
|
|
Elektrische Antriebe werden heute fast ausschließlich digital
realisiert. Ihre Funktionalität ist in der Software des Mikroprozessors
enthalten. Welche Besonderheiten sich daraus für die Antriebe ergeben,
wird nachfolgend dargestellt.
Die Antriebssoftware besteht bei genauerer Betrachtung aus einer großen
Anzahl von Unterprogrammen. Jedes Unterprogramm enthält eine bestimmte
abgegrenzte Funktionalität.
 Das
Betriebssystem des Antriebes ruft die Unterprogramme innerhalb eines bestimmten
Zeitraums (Zyklus) in einer definierten Reihenfolge auf. Diese Aufrufe
werden zyklisch wiederholt. Auf diese Weise werden alle Antriebsfunktionen
nacheinander und fortlaufend bearbeitet.
Das
Betriebssystem des Antriebes ruft die Unterprogramme innerhalb eines bestimmten
Zeitraums (Zyklus) in einer definierten Reihenfolge auf. Diese Aufrufe
werden zyklisch wiederholt. Auf diese Weise werden alle Antriebsfunktionen
nacheinander und fortlaufend bearbeitet.
Geschieht die Bearbeitung sehr schnell, erscheint es so, als ob die in
den Unterprogrammen hinterlegten Funktionen wie in einem analogen System
parallel ablaufen. Tatsächlich arbeitet der Mikroprozessor des Antriebes
jedoch seriell und arbeitet alle Funktionen nacheinander ab.
Durch Interrupts kann das Betriebssystem auf besondere Ereignisse reagieren,
die normale Reihenfolge unterbrechen und spezielle Unterprogramme bzw.
Funktionen "dazwischenschieben".
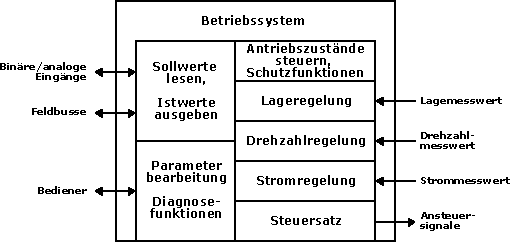
Das obenstehende Bild zeigt eine sehr stark vereinfachte Darstellung der in digitalen Antrieben benötigten Funktionen, die in den Unterprogrammen abgearbeitet werden. Es ist zu erkennen, dass neben den bereits bekannten Regelfunktionen für Strom, Drehzahl und Lage noch weitere Funktionen erforderlich sind. So müssen z. B.
werden.
Der Mikroprozessor eines digitalen Antriebes kann die in
den Unterprogrammen abgelegten Funktionen nur seriell abarbeiten. Es wäre
deshalb naheliegend, alle Unterprogramme durch das Betriebssystem in der
erforderlichen Reihenfolge aufrufen zu lassen, dann bis zum Ende der festgelegten
Zykluszeit zu warten und anschließend den nächsten Aufrufzyklus
zu beginnen. Der Mikroprozessor müsste dann allerdings so leistungsfähig
sein, dass er alle Funktionen in einer hinreichend kurzen Zeit bearbeiten
kann. Praktisch ist dieser Ansatz nicht realisierbar wenn man bedenkt,
dass die Stromregelung und der Steuersatz im Bereich von Mikrosekunden
zyklisch bearbeitet werden müssen. Bei diesem Ansatz würde auch
Unterprogramme mit weniger zeitkritischen Funktionen laufend aufgerufen
und die Rechenleistung des Mikroprozessors nutzlos verschwenden.
Man geht daher den Weg, verschiedene Zyklen zu definieren. Man nennt diese
Zyklen auch Zeitscheiben. Die Zeitscheiben bauen aufeinander auf und unterscheiden
sich in ihrer Länge jeweils um den Faktor 2. Die Zeitscheibe T0 ist
die schnellste Zeitscheibe. Die Zeitscheibe T1 ist doppelt so lang wie
die Zeitscheibe T0. Die Zeitscheibe T2 ist wiederum doppelt so lang wie
die Zeitscheibe T1 usw. Je nach Notwendigkeit kann ein digitaler Antrieb
mehr als 10 Zeitscheiben enthalten.
Die verschiedenen Unterprogramme werden nun den verschiedenen Zeitscheiben zugeordnet und damit ihre Aufrufhäufigkeit festgelegt. Die Funktionen mit den höchsten dynamischen Anforderungen, insbesondere die Regelfunktionen müssen in den kürzesten Zeitscheiben bearbeitet werden. Funktionen mit geringeren Ansprüchen an die Bearbeitungshäufigkeit wie z. B. die Parametrierschnittstelle können in langsameren Zeitscheiben bearbeitet werden.
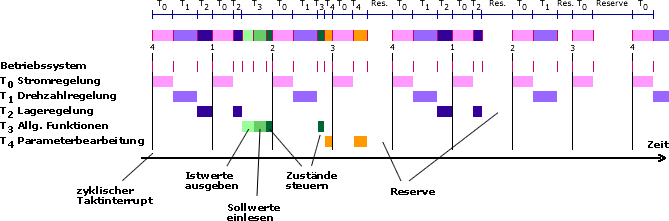
Das Betriebssystem arbeitet zeitgesteuert. Seine Arbeitsweise
wird anhand des oben stehenden Diagramms verdeutlicht.
Ein Timer sendet zyklisch einen Interrupt aus und startet damit eine neue
Zeitscheibe T0. Das Betriebssystem beginnt die Unterprogramme (z. B. die
Stromregelung) aufzurufen, die der Zeitscheibe T0 zugeordnet sind. Sind
alle diese Funktionen bearbeitet, wechselt das Betriebssystem in die Zeitscheibe
T1 und ruft die dieser Zeitscheibe zugeordneten Unterprogramme (z. B.
Drehzahlregelung) auf. Sind diese Programme bearbeitet, geht die Bearbeitung
in der Zeitscheibe T3 (z. B. Lageregelung) weiter. Irgendwann löst
der Timer jedoch einen neuen Interrupt aus. Dann wird die Bearbeitung
des laufenden Unterprogrammes unterbrochen und das Betriebssystem bearbeitet
wieder die Unterprogramme in der Zeitscheibe T0. Ist die Bearbeitung abgeschlossen,
wechselt das Betriebssystem jedoch nicht wieder automatisch in die Zeitscheibe
T1. Da die Bearbeitung von T1 bereits nach dem vorherigen Timerinterrupt
abgeschlossen wurde und das Betriebssystem nur in jedem 2. Durchlauf von
T0 die Funktionen der Zeitscheibe T1 bearbeiten muss, setzt es nun seine
Arbeit in dem zuvor unterbrochenen Unterprogramm (z. B. Lageregelung)
der Zeitscheibe T3 fort. Der weitere Ablauf kann dem Diagramm entnommen
werden. In Summe ergibt sich damit eine von Außen kaum zu durchschauende
Bearbeitungsreihenfolge der einzelnen Unterprogramme. Der Mikroprozessor
arbeitet die Funktionen insbesondere der langsameren Zeitscheiben "stückweise"
ab.
Die Unterprogramme der einzelnen Zeitscheiben dürfen
nur eine bestimmte Bearbeitungsdauer beanspruchen. Würde z. B. die
Stromregelung in der Zeitscheibe T0 sehr lange dauern, wäre kaum
noch Zeit für die Drehzahlregelung in Zeitscheibe T1. Diese könnte
nicht innerhalb der Zeitscheibe T1 vollständig abgearbeitet werden.
Das Betriebssystem würde diesen "Überlauf" der Zeitscheibe
T1 bemerken und den Antrieb abschalten. In digitalen Antrieben ist deshalb
immer eine Reserve an freier Rechenzeit erforderlich.
Durch besondere Funktionen wird sichergestellt, dass der Signalaustausch
zwischen den Zeitscheiben immer konsistent bleibt. Es wir verhindert,
dass z. B. der Drehzahlregler in der Zeitscheibe T1 einen unvollständig
berechneten Sollwert vom Lageregler bekommt, weil die Zeitscheibe T2 gerade
unterbrochen wurde.
Aufgrund der Bearbeitung der Unterprogramme in Zeitscheiben ergibt sich
im Vergleich zu analog geregelten Antrieben ein verzögerter Signaldurchlauf.
Eine Änderung des Lagesollwertes in der Zeitscheibe 1-2 wird in 2-3
am Lageregler, in 4-1 am Drehzahlregler und erst in 1-2 am Stromregler
wirksam. Es dauert im obigen Beispiel also 4 Zyklen, bis eine Lagesollwertänderung
auch tatsächlich am Stromregler eine Wirkung hervorruft. Hier liegt
ein eindeutiger Nachteil der digitalen Antriebe gegenüber den Antrieben
mit analoger Regelung. Durch immer kürzere Zykluszeiten (Zeitscheiben
T0), Verschiebung der Funktionen in immer kürzere Zeitscheiben und
durch eine geschickte Aufrufreihenfolge der Unterprogramme der soll dieser
Nachteil verringert werden.
Der Verlauf der Ausgangsgrößen ist in digitalen Regelungen nicht kontinuierlich sondern weist aufgrund der zyklischen Berechnung Sprünge auf. Innerhalb eines Zyklus ist die Ausgangsgröße konstant.
|
Name
|
Berechnungsvorschrift
|
Signalverlauf bei
sprungförmiger Anregung |
Parameter
|
Symbol |
| P-Glied | y(n)=P*x(n) | 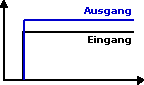 |
Proportional- verstärkung P |
 |
| I-Glied | y(n)=y(n-1)+T/Ti*x(n) | 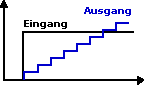 |
Integrations- zeitkonstante Ti |
 |
| D-Glied | y(n)=(x(n)-x(n-1))Td/T | 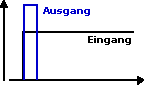 |
Differentiations- zeitkonstante Td |
 |
| PT1-Glied | y(n)=y(n-1)+((x(n)-y(n-1))*T/T1 | 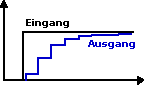 |
Zeitkonstante T1 |  |
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum