
|
|
|
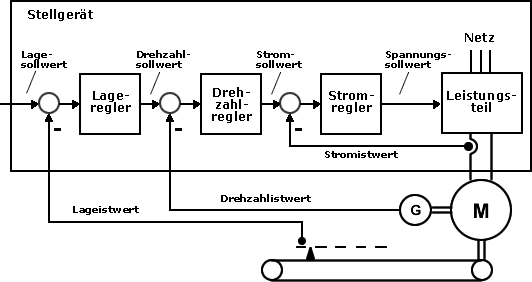
Elektrische Antriebe weisen im allgemeinen eine kaskadierte Regelungsstruktur auf. In mehreren überlagerten Regelkreisen werden die wesentlichen Zustandsgrößen
separat geregelt. Der überlagerte Regler berechnet jeweils den Sollwert für den unterlagerten Regelkreis. Der Stromregler ermittelt als unterster Regler den Spannungssollwert, übergibt ihn innerhalb des Stellgerätes an das Leistungsteil, das dann die entsprechende Spannung an den Klemmen des Motors bereitstellt. Die Strom-, Drehzahl- und Lageistwerte werden durch Sensoren und Geber erfasst und in die Regelkreise zurückgeführt.
Je nach Ausführung kann der Lageregler auch in einer übergeordneten
Positioniersteuerung angeordnet sein und der Antrieb drehzahlgeregelt
arbeiten. An der Kaskadenstruktur der Regelkreise ändert sich dadurch
jedoch nichts.
Die Kaskadenstruktur hat sich über viele Jahre in der Praxis bewährt.
Sie ist übersichtlich und ermöglicht die schrittweise Optimierung
der einzelnen Regelkreise. Gerade dieser Umstand macht sie sehr gut handhabbar
und verhinderte bisher den Durchbruch anderer Regelstrukturen wie z. B.
der Zustandsregelungen.
Die verschieden Motoren und Stellgeräte, die bei elektrischen Antrieben eingesetzt werden, erfordern unterschiedliche Algorithmen im Bereich der Stromregelung. Die verschiedenen Antriebe unterscheiden sich deshalb besonders im Bereich der Stromregelung deutlich voneinander. Oberhalb der Stromregelung, beginnend mit dem Drehzahlregler, treten kaum noch prinzipielle Unterschiede auf.
|
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum