
|
|
|
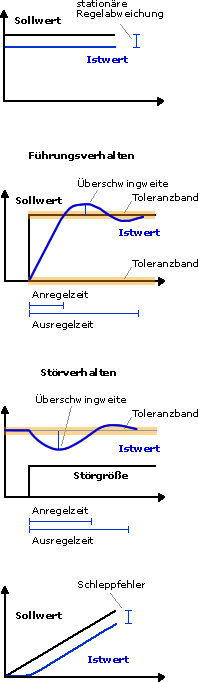
Regelkreise haben zum Teil sehr unterschiedliche Anforderungen zu erfüllen. Sie werden dem Anwendungsfall entsprechend aufgebaut und optimiert. Zur Optimierung von Regelkreisen stehen Kenngrößen zur Verfügung, nach denen Regelkreise bewertet werden können. Es wird dabei hinsichtlich dem Führungs- und dem Störverhalten unterschieden.
 Der
Regelfaktor ist eine Kenngröße für die Regelabweichung,
die sich bei konstanten Sollwerten oder Störgrößen
einstellt. Gute Regelkreise zeichnen sich durch einen Regelfaktor
von 0 aus. Das heißt, der Regelkreis kann Sollwertänderungen
folgen und Störungen ausregeln.
Der
Regelfaktor ist eine Kenngröße für die Regelabweichung,
die sich bei konstanten Sollwerten oder Störgrößen
einstellt. Gute Regelkreise zeichnen sich durch einen Regelfaktor
von 0 aus. Das heißt, der Regelkreis kann Sollwertänderungen
folgen und Störungen ausregeln.
Die Anregelzeit ist eine Kenngröße für die Reaktionsgeschwindigkeit einer Regelung nach einer sprungförmigen Änderung des Sollwertes oder der Störgröße. Sie beginnt, nachdem der Istwert ein vorgegebenes Toleranzband verlässt und endet, wenn der Istwert erstmalig in ein vorgegebenes Toleranzband um den Sollwert eintritt.
Die Ausregelzeit ist eine Kenngröße für die Geschwindigkeit, mit der eine Regelung sich nach einer sprungförmigen Änderung des Sollwertes oder der Störgröße auf ihren Endwert einschwingt Sie beginnt, nachdem der Istwert ein vorgegebenes Toleranzband verlässt und endet, wenn der Istwert letztmalig in ein vorgegebenes Toleranzband um den Sollwert eintritt. Im Idealfall entspricht die Ausregelzeit der Anregelzeit.
Die Überschwingweite beschreibt die stärkste Amplitude des Istwertes während eines Einschwingvorganges nach einer sprungförmigen Änderung des Sollwertes oder der Störgröße. Sie wird entweder absolut oder relativ bezogen auf den stationären Endwert angegeben.
Der Schleppfehler ist eine Kenngröße für
die Regelabweichung, die sich bei einem rampenförmigen Sollwert stationär
einstellt. Gute Regelkreise zeichnen sich durch einen sehr kleinen Schleppfehler
aus.
Der Schleppfehler ist besonders bei Lageregelkreisen im Zusammenhang mit
Bahnsteuerungen von Bedeutung. Lageregelungen mit einem sehr kleinen Schleppfehler
können den vorgegebenen Bahnen sehr gut folgen und erreichen damit
eine hohe Konturgenauigkeit.
Der Schleppfehler wird häufig auch als Schleppabstand bezeichnet.
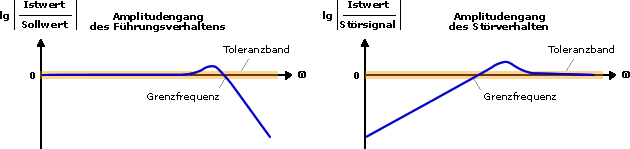
Ein sehr leistungsfähige Mittel zur Bewertung eines Regelkreises ist der Frequenzgang. Er beschreibt sein Verhalten in verschiedenen Frequenzbereichen und ist für die Darstellung des Führungs- und Störverhaltens geeignet.
Um den Frequenzgang zu ermitteln, wird der Regelkreis mit einer sinusförmigen Eingangsgröße (Sollwert oder Störgröße) beaufschlagt und der Verlauf der Ausgangsgröße (Istwert) beobachtet. Das Ergebnis wird im Bodediagramm dargestellt. Das Bodediagramm enthält zum einen den Amplitudengang und zum anderen den Phasengang.
Amplituden- und Phasengang werden über der Winkelgeschwindigkeit (Frequenz multipliziert mit 2Π) der Eingangsgröße dargestellt. Die Winkelgeschwindigkeit wird im Bodediagramm ebenfalls im dekadischen Logarithmus abgetragen.
Mit dem Frequenzgang kann die Grenzfrequenz und die Phasenreserve eines Regelkreises ermittelt werden.
Die Grenzfrequenz beschreibt, bis zu welcher Frequenz ein Regelkreis dem Sollwert folgt bzw. bis zu welcher Frequenz er Störungen unterdrückt. Gute Regelkreise zeichnen sich durch hohe Grenzfrequenzen aus.
 Die
Phasenreserve
Die
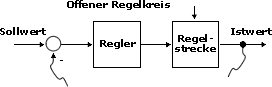
PhasenreserveDie Phasenreserve ist ein Maß für die Stabilität eines Regelkreises. Sie wird ebenfalls im Bodediagramm ermittelt. Allerdings wird dabei nicht der geschlossene Regelkreis sondern der offene Regelkreis betrachtet.
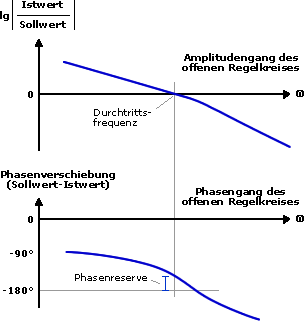
Trägt man den Amplitudengang über der Frequenz ab, erhält man die Durchtrittsfrequenz. Bei dieser Frequenz schneidet der Amplitudengang die ω-Achse. Die Amplituden von Soll- und Istwert haben bei dieser Frequenz die gleiche Größe.
Entscheidend für die Stabilität des Regelkreises ist die Phasenverschiebung zwischen Istwert und Sollwert am Punkt der Durchtrittsfrequenz. Wäre die Phasenverschiebung -180°, würde der Istwert beim Schließen des Regelkreises aufgrund der Subtraktion an der Vergleichsstelle den Sollwert verstärken und zu einer Mitkopplung führen. Der Regelkreis würde mit einer stark ansteigenden Schwingung reagieren und wäre nicht stabil.
Um eine hinreichende Stabilität des Regelkreises zu erreichen, muss ein ausreichender Abstand zwischen der Phasenverschiebung von -180° und dem Phasengang des offenen Regelkreises eingehalten werden. Dieser Abstand wird als Phasenreserve bezeichnet. Üblicherweise wird bei der Optimierung des Regelkreises eine Phasenreserve von min. 60° angestrebt.
|
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum