
|
|
|
Bürstenlose Gleichstrommotoren sind mehrphasig aufgebaut. Sie erfordern deshalb im Gegensatz zu bürstenbehafteten Gleichstrommotoren zusätzliche Funktionen in der Signalelektronik. Nachfolgend werden diese am Beispiel eines 3-phasigen bürstenlosen Gleichstrommotors dargestellt.
Bürstenlose Gleichstrommotoren werden mit einer elektronischen Kommutierung betrieben. In Abhängig von der Lage des Polrades schaltet das Stellgerät die Ströme im Ständer des Motors von einer Wicklung auf die nächste weiter und hält damit den rechten Winkel zwischen dem Magnetfeld des Läufers und dem resultierenden Zeiger des Ständerstromes aufrecht.
Die Ausgangsspannung des Leistungsteils ist die Stellgröße
für den Motorstrom. Sie ist eine vektorielle Größe und
wird durch einen Betrag (inklusive Vorzeichen) und einen Winkel beschrieben.
Während Betrag und Vorzeichen der Ausgangsspannung durch die Stromregelung
berechnet werden, leitet sich ihr Winkel aus der aktuellen Lage des Polrades
ab.
Die Lage des Polrades wird mit 3 Hallsensoren erfasst. Die Sensoren tasten
Spuren auf einer mit dem Läufer verbundenen Signalscheibe ab und
geben die Lage des Polrades binär codiert an die Regelelektronik
weiter. Die Regelelektronik wählt anschließend aufgrund er
übermittelten Lage den erforderlichen Winkel der Ausgangsspannung
aus. Dieser Vorgang ist im Signalflussplan durch einen Multiplexbaustein
dargestellt. Führt der Läufer des bürstenlosen Gleichstrommotors
eine Drehbewegung aus, werden alle 6 möglichen Ausgabewinkel für
die Ständerspannung durchlaufen.
Mit dem von der Stromregelung berechneten Betrag und Vorzeichen der Ausgangsspannung
und dem ermittelten Winkel, ist die vektoriellen Ausgangsspannung vollständig
festgelegt.
Da die vektorielle Ausgangsspannung eine rechnerische Größe
darstellt, muss sie in einem nächsten Schritt auf die einzelnen Phasenspannungen
umgerechnet werden. Diese Aufgabe übernimmt ein Wandler. Er zerlegt
den Vektor der Sollspannung in einzelne Phasenspannungen, die dann vom
Leistungsteil ausgegeben und an den Klemmen des bürstenlosen Gleichstrommotors
wirksam werden.
Hinweis:
Die Signalscheibe zur Erfassung der Lage des Polrades muss an die Polpaarzahl
des bürstenlosen Gleichstrommotors angepasst sein. Jede Signalspur
muss so viele Teilungen je Umdrehung aufweisen, wie der Motor Polpaare
hat.
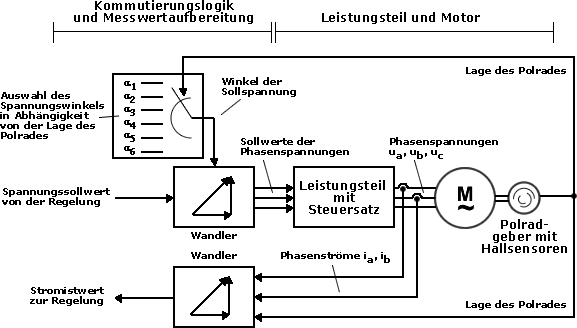
Neben der Kommutierungslogik ist für den geregelten Betrieb von 3-phasigen bürstenlosen Gleichstrommotoren auch eine Aufbereitung des Stromistwertes erforderlich. Physikalisch messbar sind lediglich die Phasenströme des angeschlossenen Motors. Diese werden nur 2-phasig erfasst, da der Strom in der dritten Phase über die Regel: "Summe der Ströme ist gleich 0" berechnet werden kann. Da die Stromregelung lediglich Betrag und Vorzeichen des Stromes benötigt, müssen diese aus den Phasenströmen und der aktuellen Lage des Polrades abgeleitet werden. Diese Aufgabe übernimmt ebenfalls ein Wandler.
Arbeiten Kommutierungslogik und Stromaufbereitung fehlerfrei, können sie aus regelungstechnischer Sicht vernachlässigt werden. Unter dieser Bedingung ergibt sich ein vereinfachter Signalflussplan, der dem eines bürstenbehafteten Gleichstrommotors gleicht.
Die Eingangsgröße der Regelstrecke bildet die vom Stromregler
ermittelte Sollspannung. Bei bürstenlosen Gleichstromantrieben ist
das der vorzeichenbehaftete Betrag des Ständerspannungszeigers. Dieser
Sollwert wird dem Leistungsteil übergeben, das an seinem Ausgang
die entsprechende Ständerspannung für den bürstenlosen
Gleichstrommotor bereitstellt. Die komplexen Vorgänge und Strukturen
im Leistungsteil werden zur Beschreibung des regelungstechnischen Verhaltens
vernachlässigt. Es ist üblich, das Leistungsteil stark zu vereinfachen
und durch ein PT1-Glied mit einer kleinen Verzögerungszeitkonstante
(bei Pulsstellern im Bereich weniger Mikrosekunden) anzunähern. Die
vom Leistungsteil bereitgestellte Ständerspannung ist begrenzt. Sie
kann einen durch die technische Realisierung des Leistungsteils und die
Höhe der Netzspannung vorgegebenen Maximalbetrag nicht überschreiten.
An den Klemmen des bürstenlosen Gleichstrommotors wird die vom Leistungsteil
bereitgestellte Ständerspannung wirksam. Zusätzlich greift hier
die durch das drehende Polrad induzierte Motor-EMK des Motors als Störgröße
ein. Sie reduziert die tatsächlich wirksame Spannung.
Die wirksame Spannung ist für den Stromfluss im Ständer des
bürstenlosen Gleichstrommotors verantwortlich. Wirksame Spannung
und Ständerstrom sind über ein PT1-Glied mit proportionaler
Verstärkung miteinander verkoppelt. Die Parameter dieser Übertragungsglieder
werden durch die elektrischen Kenngrößen des Motors, den Ständerwiderstand
und die Ständerinduktivität bestimmt. Die Ständerzeitkonstante
ist als Quotient aus der Ständerdinduktivität und dem Ständerwiderstand
definiert.
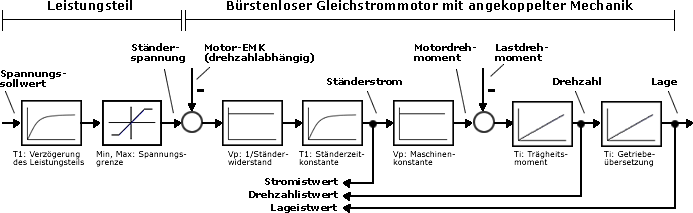
Aus dem Ständerstrom ergibt sich durch Multiplikation mit der Maschinenkonstante in einem P-Glied das Motordrehmoment. Die Maschinenkonstante ist eine Motorkenngröße, die von der Konstruktion des Motors und den im Läufer verwendeten Magnetmaterialien abhängt.
Hinweis:
Eine fehlerhaft arbeitende Kommutierung verringert die Maschinenkonstante
und reduziert das Motordrehmoment.
Das Motordrehmoment wird an der Motorwelle bereitgestellt. Gleichzeitig
greift an der Motorwelle aber auch das Lastdrehmoment der Arbeitsmaschine
als Störgröße an. Wirksam wird damit nur die Differenz
aus Motor- und Lastdrehmoment.
Das wirksame Drehmoment beschleunigt oder bremst den Motor über ein
nachgeschaltetes I-Glied und bestimmt den an der Motorwelle messbaren
Drehzahlistwert. Als Integrationszeitkonstante wirkt die Summe aus dem
Trägheitsmoment des Motors und dem Trägheitsmoment der angeschlossenen
Mechanik. Zu beachten ist, dass das Trägheitsmoment der angeschlossenen
Mechanik bezogen auf die Motorwelle von Bedeutung ist und damit die Übersetzungsverhältnisse
der verwendeten Getriebe zu berücksichtigen sind. Grundsätzlich
gilt, dass geringe Trägheitsmomente von Motor und Mechanik ein hohes
Beschleunigungsvermögen und damit eine gute Dynamik des Antriebes
bewirken.
Die Drehzahl ist die Eingangsgröße für eine weiteres I-Glied,
an dessen Ausgang der Lageistwert des Antriebes zur Verfügung steht.
Die Integrationszeitkonstante diese I-Gliedes ist das Summenübersetzungsverhältnis
der zwischen Motorwelle und Lagemesssystem angeordneten Getriebe.
Auch bei bürstenlosen Gleichstrommotoren greift man auf den Ständerstrom als Ersatzregelgröße für das Drehmoment zurück. Bei der Betrachtung des Stromregelkreises werden die Kommutierungslogik und Stromaufbereitung zwecks Vereinfachung ebenfalls vernachlässigt.
Der Stromregler wird typischer Weise als PI-Regler ausgelegt. Er besteht aus einem P-Glied und einem I-Glied, die parallel geschaltet sind. Die Summe der Ausgangssignale ergibt die Sollspannung.
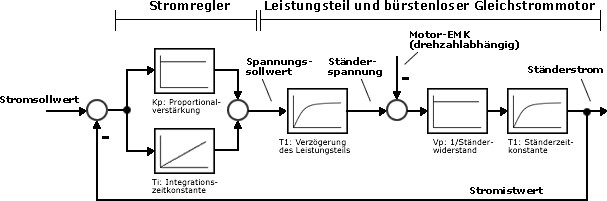
Das P-Glied und das I-Glied übernehmen unterschiedliche Aufgaben im Stromregler:
Die Verwendung eines PI-Reglers ist mit dem Nachteil verbunden, dass dynamische Regelvorgänge im Stromregelkreis immer mit einem Über- bzw. Unterschwingen des Stromistwertes verbunden sind. Durch entsprechende Wahl der Reglerparameter muss ein Kompromiss zwischen einer hohen Dynamik und einer akzeptablen Überschwingweite gefunden werden.
Hinweis:
Die Begrenzung der Ständerspannung wurde zum Zwecke der Vereinfachung
nicht dargestellt. In der praktischen Realisierung muß sie jedoch
berücksichtigt werden. Im allgemeinen wird deshalb bei Eintritt des
Spannungssollwertes in die Begrenzung das I-Glied angehalten und so ein
starkes Aufintegrieren der Regelabweichung vermieden.
Die Kompensation der Motor-EMK durch das I-Glied im Stromregler erfolgt aufgrund des erforderlichen Integrationsvorganges zeitlich verzögert. Diese Verzögerung kann durch eine Vorsteuerung des Spannungssollwertes reduziert oder sogar vollständig kompensiert werden. Die Vorsteuerung arbeitet parallel zum I-Glied des Stromreglers und entlastet dieses bei der Ausregelung der Motor-EMK.
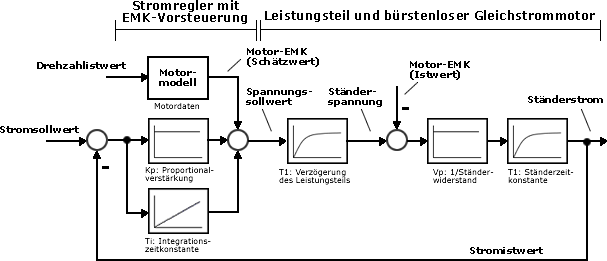
Die Vorsteuerung erhält als Eingangsgröße den Drehzahlistwert. Dieser ist aufgrund der überlagerten Drehzahlregelung in der Signalelektronik ohnehin vorhanden. Sind der Signalelektronik die entsprechenden Kenngrößen des angeschlossenen bürstenlosen Gleichstrommotors bekannt, kann sie aus der aktuellen Drehzahl in einem internen Motormodell die zu erwartende Motor-EMK berechnen. Dieser Wert wird zusätzlich auf den Summationspunkt des Stromreglers aufgeschaltet. Die im Stromregelkreis auftretende Störgröße wird damit bereits kompensiert bevor das I-Glied im Stromregler wirksam wird.
|
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum