
|
|
|
Der Asynchronmotor mit Kurzschlussßläufer zählt zu
den am weitesten verbreiteten Motortypen. Er ist einfach herzustellen,
robust und praktisch wartungsfrei. Er kann ohne Stellgerät direkt
am Drehstrom- oder Wechselstromnetz betrieben werden. Gerade dieser
Umstand sorgt dafür, dass Asynchronmotoren mit Kurzschlussläufer
in allen Bereichen der Industrie, des Verkehrswesens aber auch im Konsumgüterbereich
so stark vertreten sind.
Als Servoantriebe werden Asynchronmotoren besonders im höheren
Leistungsbereich eingesetzt.
 Funktionsprinzip
FunktionsprinzipIm Ständer des Asynchronmotors sind drei um 120° gegeneinander versetzte Wicklungen angeordnet. Der Läufer besteht aus einem genuteten Blechpaket. Durch Druckguss wird in die Nuten ein Käfig aus Aluminium eingebracht. Aus elektrischer Sicht bildet dieser Käfig ein System von kurzgeschlossenen elektrischen Leitern.
Hinweis: Um die Verluste im Läufer zu senken und die gestiegenen Anforderungen an die Effizienz von Asynchronmotoren zu erfüllen, wird bei neueren Motoren der Käfig aus Kupfer ausgeführt.
Fließt in den Wicklungen des Ständers ein sinusförmiger
elektrischer Strom und besteht zwischen den Strömen eine Phasenverschiebung
von 120°, bildet sich im Ständer des Motors ein rotierendes
Magnetfeld heraus. Dieses Magnetfeld durchsetzt auch den Läufer.
Das rotierende Magnetfeld induziert in den Leitern des Läufers
eine elektrische Spannung. Da die Leiter aufgrund ihrer Ausführung
als Käfig kurzgeschlossen sind, bewirkt die induzierte Spannung
einen Stromfluss im Läufer.
Der Läuferstrom baut ein eigenes Magnetfeld auf, das mit dem rotierenden
Magnetfeld des Ständers in Wechselwirkung tritt. Als Ergebnis wirkt
auf den Läufer ein Drehmoment. Der Läufer reagiert, führt
eine Drehbewegung aus und folgt der Rotation des Ständerfeldes.
Der Läufer folgt dem Ständerfeld jedoch nicht synchron sondern
dreht sich mit einer geringeren Geschwindigkeit. Dies ist erforderlich,
da nur unter dieser Bedingung ein Stromfluss im Läufer zustande
kommt und der Läufer sein eigenes Magnetfeld aufbauen kann. Der
Läufer dreht sich "asynchron" zum Ständerfeld.
Zwischen der Frequenz des Ständerfeldes und der Drehfrequenz des
Läufers tritt ein Schlupf auf. Die Größe des Schlupfes
ist belastungsabhängig. Im Leerlauf ist der Schlupf nur sehr gering.
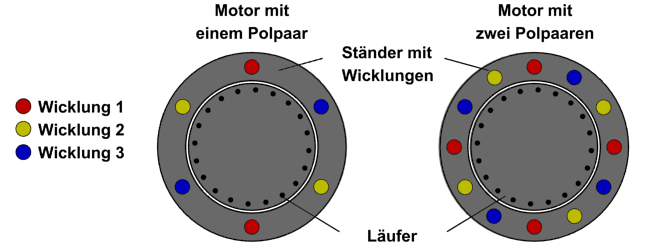
Durchwandert der Strom in den Ständerwicklungen eine volle zeitliche
Periode, dreht sich das Magnetfeld des Ständers um eine volle Polteilung
(1 Nord- und 1 Südpol) weiter. Bei 2 Polpaaren im Ständer
entspricht das einer mechanischen Drehung von 180°. Die Rotationsgeschwindigkeit
des Ständerfeldes ist gegenüber der im Motor mit einem Polpaar
auf die Hälfte abgesunken, obwohl sich die Frequenz des speisenden
Stromes nicht geändert hat.
Die Polpaarzahl des Motors hat Einfluss auf die Drehfrequenz des Ständerfeldes
und damit auf die Drehzahl bzw. Drehfrequenz des Läufers, der dem
Magnetfeld asynchron folgt. Sie sinkt mit steigender Polpaarzahl. Üblich
sind Motoren mit 1 bis 4 Polpaaren.
|
|
|
|
Anzeigen
|
w-tech, Neumannstr. 29, D-90763 Fürth, Tel. +49 (0)911 73 99
715, Fax +49 (0)911 73 99 716, info@w-tech.de
Impressum